Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
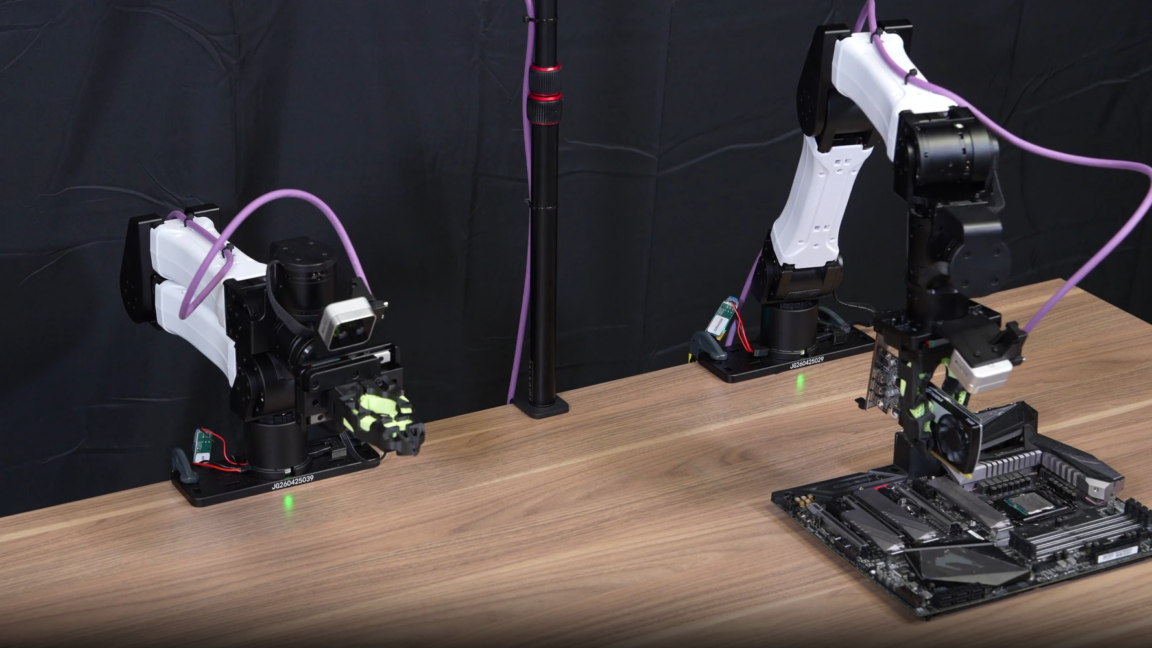
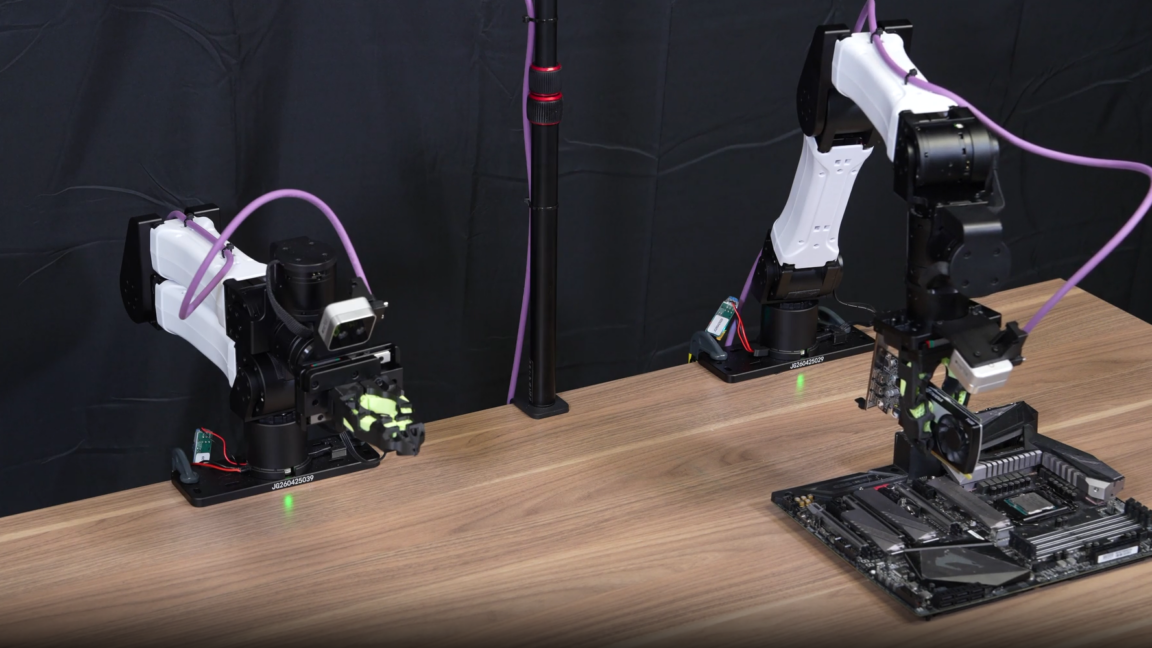
What happens when you give an AI coding lab full of robotics equipment, some computer equipment, and “a lot of money” to train the robots for different tasks? The operators can learn the training method that teaches the robots to be able to cut zip ties and install GPUs in thin metal on motherboards.
Seeing how AI can act autonomously in the creation of robot training was made possible thanks to the new software for connecting agents – software that surrounds AI models so that they can use different tools and provide skills such as memory, context, restrictions, and feedback loop. That agent line, called the EMPERORwas developed by robotics researchers at the NVIDIA GEAR (Generalist Embodied Agent Research) lab together with colleagues at Carnegie Mellon University in Pittsburgh and the University of California, Berkeley.
“Part of our NVIDIA GEAR lab is now tirelessly upgrading itself overnight,” wrote Jim Fan, head of AI at NVIDIA. LinkedIn post. “We just read the reports this morning.”
Fan also jokingly explained the goal of training the AI-led robot, saying, “We all take vacations and Jensen won’t notice,” referring to Nvidia founder and CEO Jensen Huang. But it’s not just Nvidia’s robotics researchers who will benefit – Fan said the team will be opening everything up so anyone can take their own “self-driving lab home”.
The ENPIRE harness consists of four modules that help AI coding assistants to reset and verify tasks, update the principles that guide robotic behavior, evaluate such principles on multiple robots working together, and handle failure analysis logs, input research papers, and manage training tools and algorithm codes. Technical information is available in research paper uploaded on June 16, 2026.
The code was tested with three different AI agents, including OpenAI’s Codex with GPT-5.5, Anthropic’s Claude Code with Opus 4.7, and Moonshot AI’s Kimi Code with Kimi K2.6. Teams of coding assistants developed different methods to train the robots, test them in real-world experiments, and save any changes that helped raise the overall score in repeated self-tests.



